
モンパルで自動運転

サーキットでのGPSデータ計測と走行テストを行いました。最初はすぐにコースアウトしてしまいました。
レポート/dSPACE Japan(株) 鈴木 祐次(東京都)
ベース車:HONDA モンパル ML200
完成日/2019年11月
ナンバー取得日:─
総費用:─
レポート
車両は、社内の教育用として、モノづくりを実践的に体験できる教材として使用していました。今回は、昨今の自動運転技術についての実践的な学習や自社製品を使用した事例として活用することを目的にスタートしました。
自動運転用の制御ロジックは、GPSとCNN(AI学習)による2パターンを用意していましたが、最終的にはGPS制御で完走を目指しました。
CNNによる画像解析は、処理時間の問題により今回は断念しましたが、今後はGPS以外での自動運転に挑戦したいと思います。
日常の使い方
・使用目的:社内教育用として、モノづくりの実践を体験するため。
・使用頻度:2~3ヶ月に1度程度。
・充電器と充電方法、トラブル、充電に際しての注意点:定電圧電源で直接充電しています。
自慢話
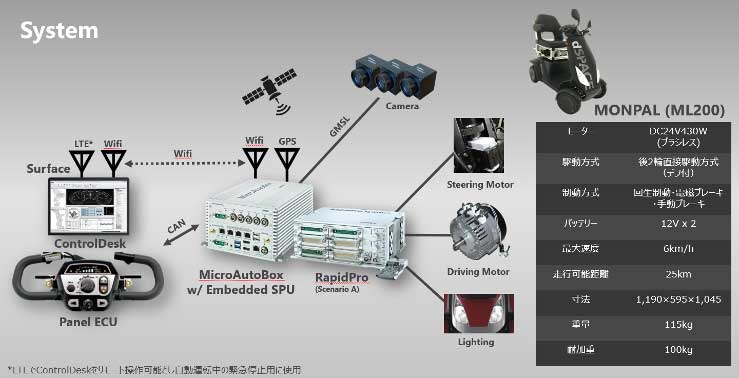
もともと製品であるシニアカーには、メーカー製のモーターコントローラーが付属しておりましたが、コントローラーをすべて置き換え、再構築し、モーターの制御プログラムを含む、以下のような基本制御、および、自動運転制御プログラムを構築しました。
・停止時のブレーキ制御(安全のための電磁ロックブレーキ)
・ウインカー点滅制御
・前進、後退、回生ブレーキのためのモーター制御
・ステアリングモーター制御、および、過電流検出
制御ロジックは自動車業界の開発で普及しているモデルベース開発(MBD)を取り入れ、MATLAB®/Simulink®という制御ダイアグラムを記述するアプリケーションで設計を行っています。設計したモデルは、そのまま車載用汎用コンピュータ(MicroAutoBox)に読み込ませ、制御ロジックとして利用、車両を制御しています。
失敗談
自動運転用に取り付けたサーボモーターの制御テスト中に、左、右、と突き当て制御をしていたらサーボモーター用のアンプ回路が破損しました。その後、制御側で電流検出を付けました。
オフィスビルのため、車両の保管は会議室などで行っていますが、移動の際に部屋入口の柱に衝突させ柱が凹み、事故報告書を書きました。
サーキットでのGPSデータ計測と走行テストを行いました。最初は、すぐにコースアウトしてしまいました。
モデルベース開発(MBD)のプロトタイプ手法では、現場での修正・確認が安易なところが特長で、コース上でロジックを修正しその場で動作確認を進めながら制御を改善しました。

製品としてのシニアカーの設計上、速度が抑制される(約4km/h)機構となっており、試行錯誤の結果、車輪の径を大きくすることで、約7km/hまで速度を上げることができるようになりました。